예전에 비해 요즘은 컴퓨터간 원격조종을 많이 하지 않는데요,
큰 이유중 하나는 사람들의 컴퓨터 다루는 기술과 지식수준이 향상되어 혼자 해결할 수 있고,
간단히 검색만 해도 쉽게 문제를 해결할 수 있어 굳이 원격으로 특정 프로그램 다운받아
복잡한 과정을 거칠 필요가 없기 때문이라 생각합니다.
또한 남에게 자신의 컴퓨터를 맡기게 되면 해킹우려도 있어 많이 사용하지 않는 것 같습니다.
근데, 오늘 소개드릴 내용이 원격입니다!
하지만 쓰임새가 다릅니다.
남에게 자신의 컴퓨터를 공유하는 것이 아닌,
급하게 맥북으로 윈도우를 사용해야 할 경우 유용한 팁입니다.
물론, 이 프로그램으로 남과 공유도 가능합니다.
아래 단계를 따르면 남과의 공유도 쉽게 할 수 있습니다.
하지만 이번 글의 취지는 '맥북으로 윈도우 사용'이기 때문에 따로
작성은 하지 않겠습니다.
저의 경우 카페에서 맥북으로 작업을 할 때,
학교에서 사용하는 컴퓨터와 원격 조종을 통해
윈도우로 작동되는 프로그램을 사용하여 매우 만족하며 사용하였습니다.
그리고 무엇보다 매우 간단하여 손 쉽게 사용이 가능합니다!
그럼 가독성을 위해 딱딱하게 작성하겠습니다
필요한 것
구글아이디, 크롬, 구글 데스크탑 앱
주의
조종컴퓨터(mac)가 아닌 원격받을 컴퓨터(window)로 먼저 아래과정을 다 따라하신 후
맥으로 원격데스크톱 앱까지만 설치해주시는 게 헷갈리지 않으실 겁니다.
또한, 같은 구글 계정으로 로그인한 상태여야 합니다.
원격하는 법
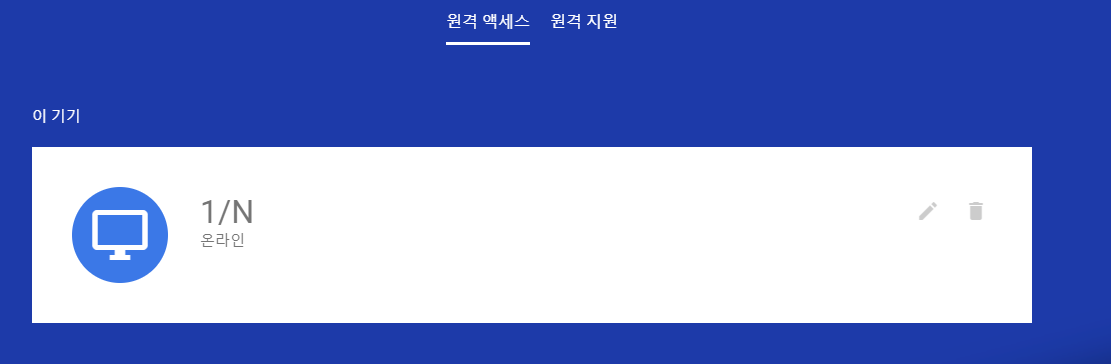
우측 상단에 원격 액세스를 클릭
위 그림에서 아래방향 화살표를 클릭
chrome remote desktop을 chrome에 추가 합니다.
이후 동의 및 설치를 눌러줍니다.
조종받을 컴(window)은 아래과정 계속 진행하시고
조종할 컴(mac)은 설치까지만 진행해 주세요
그러면 이름선택란이 나오는데
이름을 적어주시고 다음을 눌러줍니다.
이후 PIN 번호를 6자리이상 적어줍니다.
그 아래 개선참여는 원하시는 대로 하셔도 무방합니다.
완료가 되면 위와 같은 이미지가 뜹니다.
이제 원격조종할 컴퓨터(mac)로 돌아가면 기기가 뜨게 되는데,
그 기기(window)를 클릭합니다.
전에 입력한 pin번호를 입력합니다.
그럼 위와같이 mac에서 window os를 컨트롤 하는 것을
직접 경험할 수 있습니다!
+ 추가 (윈도우 파일을 맥에서 다운받기)
추가적으로 윈도우에 있는 파일을 우측 중간에 있는 화살표를 눌러
파일 다운로드를 누르면
위와 같은 대화상자가 나오는데 원하는 파일을 클릭하시면 맥에서 다운이 됩니다.
물론, 업로드도 가능합니다!
+ 단점
제가 생각하는 단점은 체감상 반응이 살짝 느려
오랫동안 맥북으로 윈도우를 작업하기에는 힘들다는 점 입니다.
두 컴퓨터 모두 켜져 있고 구글계정이 로그인된 상태에서 할 수 있으므로,
생각날 때, 바로 하기에는 갖추어야 할 조건이 많습니다.